微控制器程序规划
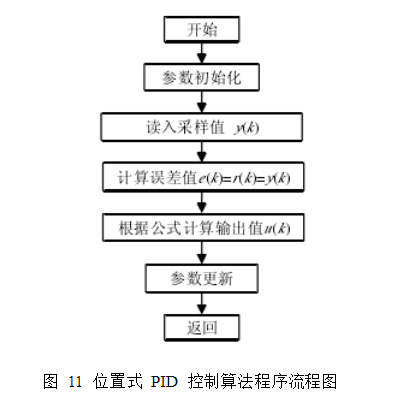
定时器中止处理程序中先完结反应信号采集和数字化,再对误差进行PID核算,再将输出的数字信号经过DA转换输出。这部分程序是整个程序规划的主要部分,而其间的核心地点便是PID输出核算的编程,下面给出了位置式PID控制算法程序流程图。在仿真过程中,还能够依据实际要求,对PID输出值进行限幅处理。
元件特点设置
原理图中各 个元件都有其详细的特点设置,大多按缺省设置即可,这儿影响仿真的设置主要是CPU特点设置和Laplace模块特点设置。原理图中运用的是常用的一阶低通Laplace模型,能够经过修改其静态放大系数和时间常数来观测不同的仿真成果。
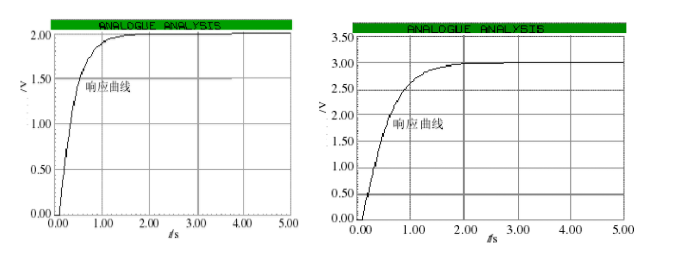
仿真与剖析
完结 上面仿真原理图和程序规划后,用软件进行仿真剖析。下面两图分别是
不同的PID参数所进行的仿真成果。